หุ่นยนต์เคลื่อนที่สามารถปรับตัวให้เข้ากับกระบวนการคัดแยกและหยิบสินค้าประจำวันได้หรือไม่?

การแนะนำ
การคัดแยกและหยิบสินค้าเป็นหัวใจสำคัญของการจัดการคลังสินค้าสมัยใหม่ และกำลังเผชิญกับแรงกดดันที่เพิ่มมากขึ้น ลองเดินเข้าไปในศูนย์กระจายสินค้าสมัยใหม่หลายแห่ง คุณจะเห็นความท้าทายได้อย่างชัดเจน: คำสั่งซื้อที่มากขึ้น จำนวน SKU ที่มหาศาล และเวลาในการจัดส่งที่น้อยลงกว่าเดิม
จำนวนสินค้าเพียงอย่างเดียวก็เพิ่มขึ้นอย่างต่อเนื่อง เนื่องจากไลฟ์สไตล์ของผู้บริโภคมีความซับซ้อนมากขึ้น บริษัทต่างๆ จึงนำเสนอสินค้าหลากหลายรูปแบบอย่างไม่รู้จบ เช่น สินค้าแบบแพ็คเกจ สินค้าที่ปรับเปลี่ยนเล็กน้อย ชุดโปรโมชั่น และสินค้าที่เพิ่มมูลค่า สิ่งที่เคยมีเพียง SKU เดียวก็แตกแขนงออกเป็นหลายรูปแบบ ส่งผลให้สภาพแวดล้อมในการจัดการคำสั่งซื้อมีความซับซ้อนมากขึ้น
ในขณะเดียวกัน พฤติกรรมของลูกค้าก็คาดเดาได้ยากขึ้น รูปแบบการสั่งซื้อในปัจจุบันมีการเปลี่ยนแปลงอย่างรวดเร็วและไม่ทันตั้งตัว โดยเฉพาะอย่างยิ่งในสถานที่ที่มีผู้ให้บริการหลายรายร่วมกัน เช่น คลังสินค้าแบบ 3PL คลังสินค้าแบบหลายผู้เช่า หรือสภาพแวดล้อมการจัดส่งแบบ Amazon สถานที่ที่ดูเหมือนจัดการได้ง่ายในชั่วโมงหนึ่ง อาจเผชิญกับคำสั่งซื้อที่เพิ่มขึ้นอย่างกะทันหันและต้องดำเนินการทันที

ระบบขนส่งที่มีอยู่สำหรับการหยิบและคัดแยกนั้นไม่สามารถยืดหรือหดได้ เนื่องจากทำงานด้วยความเร็วคงที่ และไม่สามารถปรับขนาดได้อย่างรวดเร็วตามความต้องการที่ผันผวน ไม่ว่าจะทำงานเต็มกำลังด้วยกล่องที่เคลื่อนที่อย่างรวดเร็วทีละกล่อง หรือเคลื่อนย้ายเพียงไม่กี่กล่องในระยะทางยาว ระบบก็ยังคงสิ้นเปลืองไฟฟ้าและสึกหรออย่างต่อเนื่อง ความต้องการในการบำรุงรักษายังคงไม่เปลี่ยนแปลง และหากเครื่องคัดแยกหยุดทำงาน การไหลเวียนทั้งหมดก็จะหยุดลงด้วย
สำหรับปฏิบัติการด้านการจัดส่งสินค้า ความท้าทายที่แท้จริงไม่ได้อยู่ที่ระบบอัตโนมัติขั้นพื้นฐานอีกต่อไป แต่เป็นความยืดหยุ่นในการดำเนินงานอย่างแท้จริงและการสำรองข้อมูลในตัว กล่าวคือ ความสามารถในการขยายและลดกำลังการผลิตเพื่อตอบสนองต่อความต้องการที่ผันผวนโดยไม่ต้องสร้างโครงสร้างพื้นฐานถาวรมากเกินไป ในขณะเดียวกันก็ต้องหลีกเลี่ยงจุดล้มเหลวเพียงจุดเดียว
นี่คือช่องว่างระหว่างสิ่งที่ระบบแบบดั้งเดิมให้ได้กับสิ่งที่การดำเนินงานสมัยใหม่ต้องการ การแก้ไขช่องว่างนี้จำเป็นต้องใช้วิธีการคัดแยกและหยิบสินค้าที่แตกต่างออกไป
SOTR-S ในฐานะการตอบสนองต่อความผันผวนของอุปสงค์
วิธีหนึ่งในการแก้ไขความท้าทายนี้คือการเปลี่ยนจากระบบคงที่ที่ทำงานอย่างต่อเนื่อง ไปสู่รูปแบบที่สามารถปรับความจุได้อย่างไดนามิก

SOTR-S ได้รับการออกแบบโดยคำนึงถึงวัตถุประสงค์นี้เป็นสำคัญ ในการจัดส่งสินค้าปลีกและอีคอมเมิร์ซ ความซับซ้อนส่วนใหญ่เกิดขึ้นในระดับชิ้นสินค้า การหยิบสินค้าแบบเป็นชุด (Batch picking) เป็นวิธีการที่ใช้กันอย่างแพร่หลาย โดยสินค้าที่มีรหัสสินค้า (SKU) เดียวกันที่จำเป็นสำหรับหลายคำสั่งซื้อจะถูกหยิบพร้อมกันในการหยิบครั้งเดียว จากนั้นจึงทำการคัดแยกและรวมสินค้า
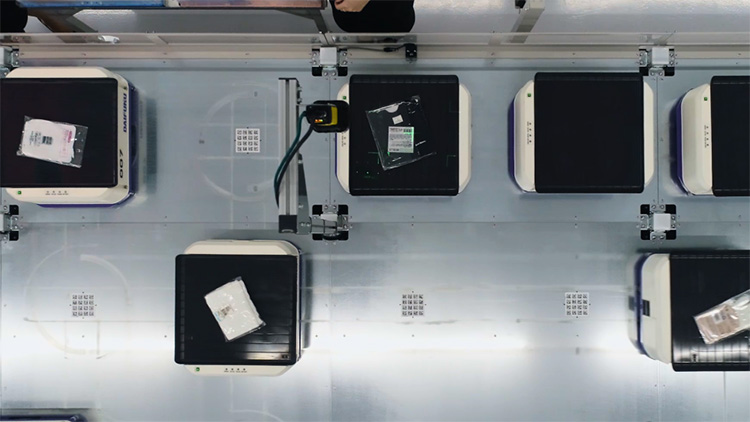
ระบบ SOTR-S สนับสนุนขั้นตอนนี้โดยใช้หุ่นยนต์เคลื่อนที่จำนวนมากในการขนส่งชิ้นส่วนแต่ละชิ้นระหว่างจุดต่างๆ ในกระบวนการผลิต
ผู้ปฏิบัติงานวางสินค้าที่หยิบแล้วลงบนหุ่นยนต์ ซึ่งหุ่นยนต์จะนำสินค้าไปยังจุดหมายปลายทางที่กำหนดไว้ แตกต่างจากเครื่องคัดแยกแบบดั้งเดิม หุ่นยนต์แต่ละตัวจะหยุดเพื่อวางสินค้า ทำให้ผู้ปฏิบัติงานไม่จำเป็นต้องเล็งเป้าหมายที่กำลังเคลื่อนที่ ซึ่งช่วยลดความเครียดและทำให้กระบวนการมีความควบคุมและสม่ำเสมอมากขึ้น
หุ่นยนต์แต่ละตัวจะได้รับจุดหมายปลายทางจากระบบควบคุมคลังสินค้าผ่านทาง RTC (Robot traffic controller) ซึ่งจะกำหนดงานและเส้นทางแบบไดนามิก ยานพาหนะทำงานอย่างอิสระ แต่ได้รับการประสานงานจากส่วนกลาง ทำให้ระบบสามารถปรับตัวให้เข้ากับสภาพปริมาณงานในปัจจุบันได้อย่างต่อเนื่อง
ด้วยการแทนที่การไหลเวียนแบบตายตัวด้วยการเคลื่อนไหวแบบเคลื่อนที่ตามภารกิจ SOTR-S จึงนำเสนอความยืดหยุ่นและความสามารถในการปรับตัวแบบเรียลไทม์ซึ่งระบบแบบดั้งเดิมขาดไป
จากปริมาณงานคงที่สู่การดำเนินงานที่ขับเคลื่อนด้วยความต้องการ

ความแตกต่างในการออกแบบนี้ส่งผลโดยตรงต่อรูปแบบการทำงานที่แตกต่างกัน สำหรับสายพานลำเลียงและเครื่องคัดแยกแบบดั้งเดิม ดังที่ได้กล่าวไว้ก่อนหน้านี้ ระบบจะต้องพร้อมใช้งานไม่ว่าจะเป็นการจัดการปริมาณสูงสุดหรือปริมาณน้อยก็ตาม แม้ว่าระบบลำเลียงที่ออกแบบมาอย่างดีจะช่วยลดเวลาการทำงานโดยการหยุดโซนลำเลียงทีละโซนเพื่อหลีกเลี่ยงการเคลื่อนไหวที่ไม่จำเป็นและการใช้พลังงานไฟฟ้า แต่ก็ยังคงมีการใช้พลังงานที่ไม่มีประสิทธิภาพและหลีกเลี่ยงไม่ได้อยู่บ้าง รวมถึงการสึกหรอของกลไก แม้ว่าปริมาณงานจะถูกจำกัดก็ตาม
ในทางตรงกันข้าม SOTR-S ช่วยให้สามารถปรับกำลังการผลิตให้สอดคล้องกับความต้องการได้ เนื่องจากหุ่นยนต์แต่ละตัวทำงานอย่างอิสระ กิจกรรมของฝูงหุ่นยนต์จึงสอดคล้องกับความต้องการปริมาณงานจริงอย่างต่อเนื่อง ในทางปฏิบัติ จะมีเพียงหุ่นยนต์ที่จำเป็นในแต่ละช่วงเวลาเท่านั้นที่เคลื่อนที่ โดยอิงตามปริมาณงานแบบเรียลไทม์ การควบคุมอัจฉริยะตามภารกิจนี้ช่วยลดการเคลื่อนไหวของหุ่นยนต์ที่ไม่จำเป็น ส่งผลให้การใช้พลังงานเหมาะสมที่สุดและการใช้ประโยชน์จากอุปกรณ์มีประสิทธิภาพมากขึ้น นอกจากนี้ ในช่วงนอกฤดูกาลท่องเที่ยวที่ยาวนาน เช่น เดือนหลังวันแบล็กฟรายเดย์และช่วงเทศกาลวันหยุด ส่วนหนึ่งของฝูงหุ่นยนต์สามารถปิดใช้งานได้ ซึ่งจะช่วยเพิ่มประสิทธิภาพโดยรวมให้ดียิ่งขึ้น
ด้วยเหตุนี้ SOTR-S จึงช่วยให้รูปแบบการดำเนินงานมีประสิทธิภาพมากขึ้น โดยที่การใช้พลังงานและการใช้งานอุปกรณ์จะเชื่อมโยงกับปริมาณงานจริงมากกว่าความจุของระบบที่คงที่
ความยืดหยุ่นในตัวและการใช้สินทรัพย์อย่างมีประสิทธิภาพ
โครงสร้างการทำงานแบบกระจายศูนย์และใช้หุ่นยนต์หลายตัวนี้ยังช่วยเพิ่มความยืดหยุ่นของระบบอีกด้วย ในระบบแบบดั้งเดิม ความล้มเหลวเพียงครั้งเดียวก็สามารถทำให้การทำงานทั้งหมดหยุดชะงักได้ เมื่อเครื่องคัดแยกหยุดทำงาน ทุกอย่างก็จะหยุดไปด้วย แต่ด้วยระบบ SOTR-S ภาระงานจะกระจายไปยังหุ่นยนต์หลายตัวและเส้นทางสำรอง ดังนั้นความล้มเหลวจึงเกิดขึ้นเฉพาะจุด: หากหุ่นยนต์ตัวใดตัวหนึ่งหยุดทำงาน ภาระงานที่อยู่บนหุ่นยนต์ตัวนั้นเท่านั้นที่จะได้รับผลกระทบ ในขณะที่ส่วนที่เหลือของระบบยังคงทำงานต่อไปได้
หลักการเดียวกันนี้ไม่เพียงใช้ได้กับความล้มเหลวที่ไม่คาดคิดเท่านั้น แต่ยังใช้ได้กับการบำรุงรักษาตามปกติด้วย หุ่นยนต์แต่ละตัวสามารถหยุดการทำงานได้ตามต้องการ ทำให้สามารถดำเนินการบำรุงรักษาได้โดยไม่ขัดจังหวะการทำงานของระบบ ส่งผลให้ไม่จำเป็นต้องปิดระบบทั้งหมด และไม่จำเป็นต้องตรวจสอบในเวลากลางคืนซึ่งมักจำเป็นในระบบแบบดั้งเดิมอีกต่อไป การบำรุงรักษาสามารถดำเนินการได้อย่างเป็นระบบและควบคุมได้ในขณะที่ระบบยังคงทำงานอยู่
ความสามารถในการรับมือกับสถานการณ์วิกฤตนี้ ซึ่งเกิดขึ้นจากการแยกผลกระทบที่ระดับหุ่นยนต์ ช่วยให้ SOTR S สามารถทำงานได้อย่างต่อเนื่องทั้งในระหว่างเกิดความล้มเหลวและการบำรุงรักษา ส่งผลให้เวลาการทำงานของระบบเพิ่มขึ้น และการใช้สินทรัพย์มีประสิทธิภาพและคาดการณ์ได้ดียิ่งขึ้น
บทสรุป
ระบบ SOTR-S ช่วยให้สามารถใช้งานโมเดลการทำงานที่ขับเคลื่อนด้วยความต้องการ ซึ่งกำลังการผลิต การใช้พลังงาน และความพร้อมใช้งานของระบบจะปรับเปลี่ยนอย่างต่อเนื่องตามปริมาณงานจริง อัตราการผลิตสามารถปรับให้ตรงกับความต้องการจริงได้อย่างแม่นยำ ทำให้ระบบสามารถปรับตัวให้เข้ากับการผันผวนของปริมาณงานโดยไม่ต้องเสียค่าใช้จ่ายที่ไม่จำเป็น ในขณะเดียวกัน เนื่องจากไม่มีจุดล้มเหลวเพียงจุดเดียว ระบบจึงยังคงทำงานต่อไปได้แม้ว่าหน่วยใดหน่วยหนึ่งจะหยุดทำงาน ผลลัพธ์ที่ได้คือโมเดลที่ใช้ทรัพยากรเฉพาะเมื่อมีส่วนช่วยในการประมวลผลเท่านั้น ทำให้มั่นใจได้ถึงประสิทธิภาพการทำงานโดยไม่สิ้นเปลือง
ซีรีส์ SOTR ของ Daifuku

อยากรู้เพิ่มเติมเกี่ยวกับซีรีส์ SOTR ของเราและอยากเห็นการใช้งานจริงใช่ไหม? คลิกที่ลิงก์ด้านล่างเพื่อค้นหาข้อมูลเพิ่มเติม
เซดริก เซโด

วิศวกรโครงการอาวุโส, ไดฟุกุ ยุโรป
เซดริก เซโด เป็นวิศวกรโครงการอาวุโสที่ไดฟุกุ มีประสบการณ์มากกว่าแปดปีในด้านระบบอัตโนมัติในคลังสินค้าและโลจิสติกส์ภายในองค์กร โดยมีความเชี่ยวชาญด้านการบูรณาการระบบ เซดริกมีบทบาทสำคัญในการส่งมอบโซลูชันการจัดการวัสดุอัตโนมัติที่ซับซ้อน เพื่อให้มั่นใจถึงการประสานงานที่ราบรื่นระหว่างระบบกลไก ไฟฟ้า และซอฟต์แวร์
ในบทบาทของเขา เซดริกมุ่งเน้นไปที่การนำเทคโนโลยีระบบอัตโนมัติมาใช้ โดยทำงานอย่างใกล้ชิดกับทีมงานข้ามสายงานเพื่อนำเสนอโซลูชันคลังสินค้าที่ทันสมัย ตั้งแต่ขั้นตอนการวางแนวคิดไปจนถึงการใช้งานจริง ประสบการณ์ของเขารวมถึงการบูรณาการและการติดตั้งระบบอัตโนมัติขั้นสูงที่ออกแบบมาเพื่อปรับปรุงประสิทธิภาพ ความสามารถในการขยายขนาด และความน่าเชื่อถือภายในสภาพแวดล้อมการกระจายสินค้าสมัยใหม่
เซดริกสำเร็จการศึกษาระดับปริญญาโทด้านการจัดการวิศวกรรม และได้รับประกาศนียบัตรระดับมหาวิทยาลัยด้านแบบจำลองข้อมูลอาคาร (BIM) นอกจากนี้ เขายังได้รับการรับรองเครื่องหมาย CE จาก TUV NORD ซึ่งแสดงให้เห็นถึงความมุ่งมั่นของเขาในการปฏิบัติตามกฎระเบียบ ความปลอดภัย และความเป็นเลิศทางวิศวกรรมในโครงการระบบอัตโนมัติทางอุตสาหกรรม
