¿Puede la robótica móvil adaptarse a las oleadas diarias de clasificación y recogida?

Introducción
La clasificación y la selección de productos son fundamentales para la logística moderna, y están sometidas a una presión cada vez mayor. Basta con visitar muchos centros de distribución modernos para darse cuenta del desafío: más pedidos, un número ingente de referencias y mucho menos tiempo para realizar los envíos.
La cantidad de productos no deja de crecer. A medida que los estilos de vida de los consumidores se vuelven más sofisticados, las empresas introducen un sinfín de variaciones, como paquetes de productos, versiones ligeramente modificadas, conjuntos promocionales y combinaciones con valor añadido. Lo que antes era una sola referencia se ramifica rápidamente en múltiples variantes. El resultado es un entorno de gestión de pedidos más complejo.
Al mismo tiempo, predecir el comportamiento del cliente se ha vuelto más difícil. Los patrones de pedidos ahora generan picos más pronunciados con menos aviso, especialmente en instalaciones compartidas entre varios proveedores, como operaciones de logística de terceros (3PL), almacenes multiusuario o entornos de distribución tipo Amazon. Las instalaciones que parecen manejables una hora antes pueden enfrentarse repentinamente a un aumento repentino de pedidos que deben procesarse de inmediato.

Los sistemas de transporte actuales utilizados para la selección y clasificación no pueden ampliarse en ninguna dirección, ya que operan a una velocidad fija. Tampoco pueden escalar rápidamente ante las fluctuaciones de la demanda. Ya sea que funcionen a plena capacidad con cajas que se mueven muy juntas o que transporten solo unas pocas cajas en tramos largos, siguen consumiendo electricidad y acumulando desgaste. Los requisitos de mantenimiento permanecen prácticamente constantes, y si la clasificadora se detiene, generalmente se detiene todo el flujo con ella.
En las operaciones de cumplimiento de pedidos, el verdadero desafío ya no reside en la automatización básica, sino en una elasticidad operativa real y una redundancia integrada: la capacidad de ampliar y reducir la capacidad en respuesta a una demanda volátil sin sobredimensionar la infraestructura fija, evitando al mismo tiempo puntos únicos de fallo.
Esta es la brecha entre lo que ofrecen los sistemas tradicionales y lo que requieren las operaciones modernas. Para solucionar esta brecha, se necesita un enfoque diferente para la clasificación y la preparación de pedidos.
SOTR-S como respuesta a la variabilidad de la demanda
Una forma de abordar este desafío es alejarse de los sistemas fijos y de funcionamiento continuo y avanzar hacia un modelo en el que la capacidad pueda ajustarse dinámicamente.

El SOTR-S está diseñado con este objetivo en mente. En la logística de venta minorista y comercio electrónico, gran parte de la complejidad reside en la selección de cada artículo. La preparación de pedidos por lotes es muy utilizada: los mismos artículos requeridos por varios pedidos se seleccionan juntos en una sola pasada, para luego clasificarlos y consolidarlos.
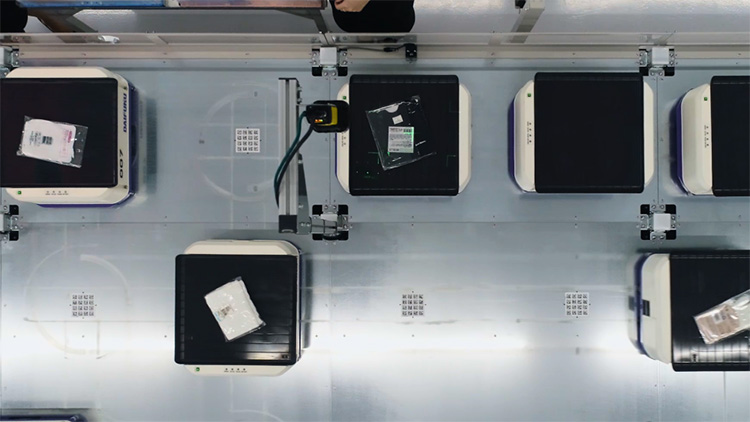
El sistema SOTR-S facilita esta etapa mediante el uso de una flota de robots móviles para transportar artículos individuales entre los diferentes puntos del proceso.
Los operarios colocan los artículos seleccionados en los robots, que luego los transportan a sus destinos asignados. A diferencia de las clasificadoras tradicionales, cada robot se detiene para colocar los artículos, eliminando la necesidad de que los operarios apunten a un objetivo en movimiento. Esto reduce el estrés y hace que el proceso sea más controlado y uniforme.
Cada robot recibe su destino del sistema de control del almacén mediante un controlador de tráfico robótico (RTC), que asigna dinámicamente tareas y rutas. Los vehículos operan de forma independiente, pero están coordinados centralmente, lo que permite que el sistema se ajuste continuamente a las condiciones de carga de trabajo actuales.
Al sustituir el flujo fijo por un movimiento móvil basado en tareas, el SOTR-S introduce la flexibilidad y la adaptabilidad en tiempo real de las que carecen los sistemas tradicionales.
De un rendimiento fijo a una operación basada en la demanda

Esta diferencia de diseño conlleva directamente un modelo operativo distinto. Con las cintas transportadoras y clasificadoras tradicionales, como ya se mencionó, los sistemas deben estar en funcionamiento independientemente de si manejan volúmenes máximos o flujos mínimos. Si bien los sistemas de transporte bien diseñados minimizan el tiempo de funcionamiento al detener las zonas de transporte una por una para evitar movimientos innecesarios y consumo eléctrico, aún persiste cierto consumo de energía ineficiente, residual e inevitable, junto con el desgaste mecánico, incluso cuando el rendimiento es limitado.
En cambio, el SOTR-S permite que la capacidad se ajuste a la demanda. Dado que cada robot opera de forma independiente, la actividad de la flota se alinea continuamente con los requisitos de producción reales. En la práctica, solo se mueven los vehículos necesarios en cada momento, en función de la carga de trabajo en tiempo real. Este control inteligente basado en tareas minimiza los movimientos innecesarios de los robots, lo que optimiza el consumo de energía y la utilización del equipo. Además, durante periodos prolongados de baja demanda, como los meses posteriores al Black Friday y la temporada navideña, parte de la flota puede desconectarse, mejorando aún más la eficiencia general.
Como resultado, el SOTR-S permite un modelo operativo más eficiente en el que el consumo de energía y el uso de los equipos están estrechamente vinculados a la carga de trabajo real, en lugar de a una capacidad fija del sistema.
Resiliencia integrada y uso eficiente de los activos
Esta estructura operativa distribuida con múltiples robots también transforma la resiliencia del sistema. En los sistemas tradicionales, un solo fallo puede interrumpir toda la operación. Cuando un clasificador se detiene, todo se detiene. Con el SOTR-S, las cargas se distribuyen entre varios robots y rutas alternativas. Por lo tanto, los fallos se localizan: si un robot se detiene, solo se ve afectada la carga de ese robot, mientras que el resto del sistema continúa funcionando.
Este mismo principio se aplica no solo a fallos inesperados, sino también al mantenimiento rutinario. Los robots individuales pueden desconectarse según sea necesario, lo que permite realizar el mantenimiento sin interrumpir el funcionamiento del sistema. Como resultado, ya no son necesarios los apagados completos del sistema ni las inspecciones nocturnas que suelen requerir los sistemas tradicionales. En su lugar, el mantenimiento puede llevarse a cabo de forma planificada y controlada mientras el sistema permanece en funcionamiento.
Esta resiliencia integrada, lograda mediante el aislamiento del impacto a nivel del robot, permite que el SOTR S mantenga un funcionamiento continuo tanto en caso de fallos como durante el mantenimiento. Como resultado, aumenta el tiempo de actividad del sistema y los activos se utilizan de forma más eficiente y predecible.
Conclusión
El SOTR-S permite un modelo operativo basado en la demanda, donde la capacidad, el consumo de energía y la disponibilidad del sistema se ajustan continuamente a la carga de trabajo real. El rendimiento se adapta con precisión a la demanda real, lo que permite que el sistema se ajuste a las fluctuaciones de volumen sin incurrir en costos innecesarios. Al mismo tiempo, al no existir un único punto de fallo, el sistema continúa funcionando incluso si una unidad se detiene. El resultado es un modelo donde los recursos se utilizan solo cuando contribuyen al procesamiento, lo que garantiza un rendimiento eficiente sin desperdicio.
Serie SOTR de Daifuku

¿Tienes curiosidad por saber más sobre nuestra serie SOTR y verla en acción? Haz clic en los enlaces a continuación para descubrir más.
Cedric Sedo

Ingeniero sénior de proyectos, Daifuku Europa
Cedric Sedo es ingeniero sénior de proyectos en Daifuku y cuenta con más de ocho años de experiencia en automatización de almacenes e intralogística. Especializado en integración de sistemas, Cedric desempeña un papel fundamental en la entrega de soluciones complejas de manipulación automatizada de materiales, garantizando una coordinación perfecta entre los sistemas mecánicos, eléctricos y de software.
En su puesto, Cedric se centra en la implementación de tecnologías de automatización, trabajando en estrecha colaboración con equipos multidisciplinarios para llevar soluciones innovadoras para almacenes desde su concepción hasta su puesta en marcha. Su experiencia abarca la integración y puesta en marcha de sistemas de automatización avanzados diseñados para mejorar la eficiencia, la escalabilidad y la fiabilidad en entornos de distribución modernos.
Cedric posee una maestría en Gestión de Ingeniería y un diploma universitario en Modelado de Información para la Construcción (BIM). Además, cuenta con la certificación CE otorgada por TÜV NORD, lo que demuestra su compromiso con el cumplimiento normativo, la seguridad y la excelencia en ingeniería en proyectos de automatización industrial.
