移動機器人能否適應日常分類和揀貨流程?

介紹
分類和揀貨是現代物流配送的核心,但如今它們正面臨越來越大的壓力。走進許多現代化的配送中心,挑戰顯而易見:訂單量激增,SKU數量龐大,而出貨時間卻大大縮短。
單是產品數量就持續成長。隨著消費者生活方式的日益複雜,企業不斷推出各種各樣的衍生產品,例如捆綁銷售、略微修改的版本、促銷套裝和增值組合。曾經只有一個SKU的產品,很快就會衍生出多個變體。這導致訂單履行環境變得更加複雜。
同時,客戶行為也變得更加難以預測。訂單模式如今更容易出現突如其來的高峰,且預警時間更短,尤其是在多家供應商共享的設施中,例如第三方物流運營、多租戶倉庫或亞馬遜類型的物流配送環境。原本看起來井然有序的設施,可能一小時後就面臨訂單激增,必須立即處理。

現有的揀選和分類輸送系統無法擴展產能,因為它們的運作速度固定。它們也無法快速適應需求的波動。無論是滿載運轉,箱子緊密地一個接一個地移動,還是只移動少量箱子,它們都會持續消耗電力並不斷磨損。維護需求基本上保持不變,如果分類機停止運行,整個流程通常也會隨之停止。
對於物流運作而言,真正的挑戰不再是基本的自動化,而是真正的營運彈性和內建冗餘:能夠在不過度建造固定基礎設施的情況下,根據波動的需求擴展和收縮產能,同時避免單點故障。
這就是傳統系統所提供的功能與現代營運需求之間的差距。要彌補這一差距,就需要採用不同的分類和揀選方法。
SOTR-S 作為因應需求變化的措施
應對這項挑戰的一個方法是摒棄固定、持續運作的系統,轉而採用容量可以動態調整的模型。

SOTR-S 的設計正是基於此目標。在零售和電商物流中,大部分複雜性都體現在單件商品層面。批量揀貨被廣泛應用,即將多個訂單所需的相同 SKU 一次性揀選在一起,然後進行分類和合併。
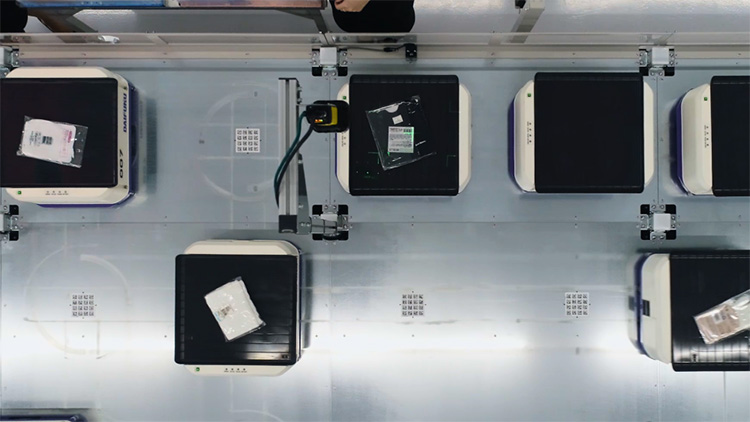
SOTR-S 透過使用移動機器人集群在加工點之間運輸單一物品來支援這一階段。
操作員將揀選好的物品放置在機器人上,機器人隨後將物品運送到指定地點。與傳統分類機不同,每個機器人都會停下來放置物品,而無需操作員瞄準移動的目標。這減輕了操作員的壓力,並使整個過程更加可控和穩定。
每台機器人透過機器人交通控制器 (RTC) 從倉庫控制系統接收目的地訊息,RTC 會動態分配任務和路線。車輛獨立運行,但由中央控制系統協調,使系統能夠持續調整以適應當前的工作負載情況。
SOTR-S 透過以移動的、基於任務的移動取代固定的流程,引入了傳統系統所缺乏的靈活性和即時適應性。
從固定吞吐量到需求驅動營運

這種設計上的差異直接導致了不同的運作模式。如前所述,傳統的輸送機和分類機系統無論處理高峰流量或低流量,都必須投入使用。雖然設計良好的輸送系統可以透過逐一停止輸送段來最大限度地減少運行時間,從而避免不必要的移動和電力消耗,但即使吞吐量有限,仍然存在一些殘餘的、不可避免的低效能源消耗以及機械磨損。
相較之下,SOTR-S 系統能夠根據需求調整運力。由於每台機器人獨立運行,車隊的運作始終與實際吞吐量需求保持一致。實際上,系統會根據即時工作負載,僅在特定時刻運行所需的車輛。這種基於任務的智慧控制最大限度地減少了不必要的機器人移動,從而優化了能源利用,並提高了設備效率。此外,在較長的非高峰期——例如黑色星期五和假日之後的幾個月——部分車隊可以停運,進一步提升整體效率。
因此,SOTR-S 能夠實現更有效率的運作模式,其中能源消耗和設備使用與實際工作負載密切相關,而不是與固定的系統容量相關。
內建彈性及高效率資產利用
這種分散式多機器人運作結構也提升了系統的韌性。在傳統系統中,單一故障就可能導致整個運作中斷。分類機一旦停止運轉,所有系統都會停止。而SOTR-S系統則將負載分配到多個機器人和備用路徑上。因此,故障被局限在局部範圍內:如果一個機器人停止運轉,只會影響該機器人上的負載,而係統的其餘部分仍能繼續運作。
同樣的原理不僅適用於意外故障,也適用於日常維護。可以根據需要將單一機器人離線,從而在不中斷系統運作的情況下進行維護。因此,不再需要完全關閉系統,也無需像傳統系統一樣進行夜間巡檢。維護工作可以在系統運作的同時,以規劃週詳、可控的方式進行。
這種透過在機器人層面隔離衝擊而實現的內建韌性,使SOTR S能夠在故障和維護期間保持持續運作。因此,系統正常運作時間得以延長,資產利用率也更高、更可預測。
結論
SOTR-S 系統支援按需運作模式,其容量、能耗和系統可用性可根據實際工作負載持續調整。吞吐量可與實際需求精確匹配,使系統能夠適應業務量波動,而無需承擔不必要的成本。同時,由於不存在單點故障,即使某個單元發生故障,系統也能繼續運作。最終,該模型實現了資源僅在有助於處理時才被使用,從而確保高效運行,避免資源浪費。
大福的SOTR系列

想了解更多關於我們SOTR系列的資訊並觀看實際演示嗎?點擊下方連結了解更多詳情。
塞德里克·塞多

大福歐洲公司資深專案工程師
Cedric Sedo是Daifuku公司的高級專案工程師,在倉庫自動化和內部物流領域擁有超過八年的經驗。他專注於系統集成,在交付複雜的自動化物料搬運解決方案方面發揮關鍵作用,確保機械、電氣和軟體系統之間的無縫協調。
塞德里克的工作重點是自動化技術的實施,他與跨職能團隊緊密合作,將創新的倉儲解決方案從概念階段推進到營運部署階段。他擁有豐富的經驗,涵蓋先進自動化系統的整合和調試,這些系統旨在提高現代配送環境的效率、可擴展性和可靠性。
塞德里克擁有工程管理碩士學位和建築資訊模型(BIM)大學文憑。他還通過了TUV NORD的CECE認證,獲得了CE標誌認證,體現了他對工業自動化項目合規性、安全性和卓越工程的承諾。
