Can Mobile Robotics Adopt to Daily Sortation and Picking Waves?

Introduction
Sorting and picking sit at the heart of modern fulfillment, and they are under growing strain. Walk into many modern distribution centers and the challenge is obvious: more orders, huge numbers of SKUs, and far less time to ship them.
The number of products alone keeps expanding. As consumer lifestyles become more sophisticated, companies introduce endless variations, such as bundled products, slightly modified versions, promotional sets, and value-added combinations. What used to be one SKU quickly branch into multiple variants. The result is a more complex order fulfillment environment.
At the same time, customer behavior has become harder to predict. Order patterns now produce sharper spikes with less warning, especially in facilities shared between multiple vendors such as 3PL operations, multi-tenant warehouses, or Amazon-type fulfillment environments. Facilities that appear manageable one hour can suddenly face a surge of orders that must be processed immediately.

The existing conveyance systems used for picking and sorting cannot be stretched either way, as they operate at a fixed speed. Nor can they quickly scale with fluctuating demand. Whether running at full capacity with boxes moving tightly one after another or moving only a few boxes over long stretches, they continue to consume electricity and accumulate wear. Maintenance requirements remain largely constant, and if the sorter stops, the entire flow typically stops with it.
For fulfillment operations, the real challenge is no longer basic automation, but real operational elasticity and built-in redundancy: the ability to expand and contract capacity in response to volatile demand without overbuilding fixed infrastructure, while avoiding single points of failure.
This is the gap between what traditional systems provide and what modern operations require. Addressing this gap calls for a different approach to sortation and picking.
SOTR-S as a Response to Demand Variability
One way to address this challenge is to move away from fixed, continuously running systems and toward a model where capacity can adjust dynamically.

The SOTR-S is designed with this objective in mind. In retail and e-commerce fulfillment, much of the complexity comes at the piece level. Batch picking is widely used, where the same SKUs required by multiple orders are picked together in a single pass, then sorted and consolidated.
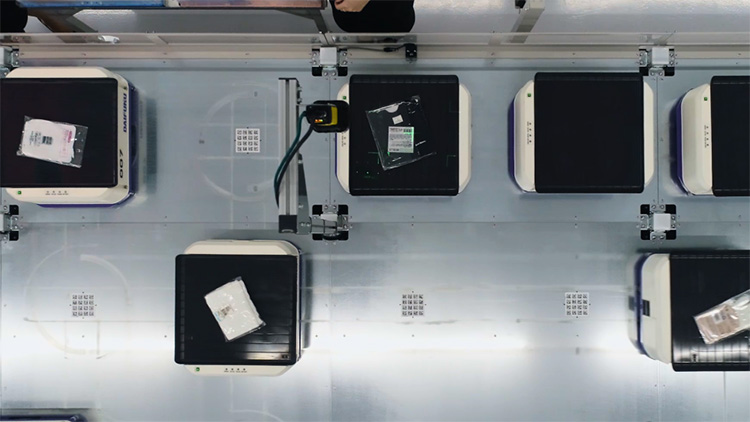
The SOTR-S supports this stage by using a fleet of mobile robots to transport individual items between process points.
Operators place picked items onto the robots, which then carry them to their assigned destinations. Unlike traditional sorters, each robot stops for item placement, removing the need for operators to aim at a moving target. This reduces stress and makes the process more controlled and consistent.
Each robot receives its destination from the warehouse control system via an RTC (Robot traffic controller), which dynamically assigns tasks and routes. Vehicles operate independently but are centrally coordinated, allowing the system to continuously adjust to current workload conditions.
By replacing fixed flow with mobile, task-based movement, the SOTR-S introduces the flexibility and real-time adaptability that traditional systems lack.
From Fixed Throughput to Demand-Driven Operation

This difference in design leads directly to a different operating model. With traditional conveyors and sorters, as discussed earlier, systems must be in place regardless of whether they handle peak volumes or minimal flow. While well-designed conveying systems minimize runtime by stopping conveyor zones one by one to avoid unnecessary movement and electrical consumption, some residual and unavoidable inefficient energy use, along with mechanical wear, still remains even when throughput is limited.
The SOTR-S, by contrast, allows capacity to follow demand. Because each robot operates independently, fleet activity is continuously aligned with actual throughput requirements. In practice, only the vehicles required at a given moment are moving, based on real-time workload. This intelligent, task-based control minimizes unnecessary robot movement, leading to optimized energy use and more efficient utilization of equipment. In addition, during extended off-peak periods—such as the months following the Black Friday and holiday season—part of the fleet can be taken offline, further improving overall efficiency.
As a result, the SOTR-S enables a more efficient operating model in which energy consumption and equipment usage are closely tied to actual workload, rather than fixed system capacity.
Built-In Resilience and Efficient Asset Use
This distributed, multi‑robot operating structure also transforms system resilience. In traditional systems, a single failure can disrupt the entire operation. When a sorter stops, everything stops. With the SOTR-S, loads are distributed across multiple robots and alternative routes. Failures are therefore localized: if one robot stops, only the load on that robot is affected while the rest of the system continues to operate.
The same principle applies not only to unexpected failures, but also to routine maintenance. Individual robots can be taken offline as needed, allowing maintenance to be performed without interrupting system operation. As a result, full system shutdowns—and the nighttime inspections often required in traditional systems—are no longer necessary. Maintenance can instead be carried out in a planned, controlled manner while the system remains in operation.
This built in resilience, achieved by isolating impact at the robot level, allows the SOTR S to maintain continuous operation during both failures and maintenance. As a result, system uptime increases and assets are used more efficiently and predictably.
Conclusion
The SOTR‑S enables a demand‑driven operating model in which capacity, energy use, and system availability adjust continuously to actual workload. Throughput can be matched precisely to actual demand, allowing the system to adapt to volume fluctuations without carrying unnecessary cost. At the same time, because there is no single point of failure, the system continues to run even if one unit stops. The result is a model where resources are used only when they contribute to processing, ensuring efficient performance without waste.
Daifuku's SOTR Series

Curious to find out more about our SOTR Series and see it in action? Click the links below to discover more.
Cedric Sedo

Senior Project Engineer, Daifuku Europe
Cedric Sedo is a senior project engineer at Daifuku with over eight years of experience in warehouse automation and intralogistics. Specializing in system integration, Cedric plays a key role in delivering complex automated material handling solutions, ensuring seamless coordination between mechanical, electrical, and software systems.
In his role, Cedric focuses on the implementation of automation technologies, working closely with cross-functional teams to bring innovative warehouse solutions from concept through to operational deployment. His experience spans the integration and commissioning of advanced automation systems designed to improve efficiency, scalability, and reliability within modern distribution environments.
Cedric holds an MSc in Engineering Management and a University Diploma in Building Information Modelling (BIM). He is also certified in CE Marking through the CECE certification by TUV NORD, demonstrating his commitment to compliance, safety, and engineering excellence in industrial automation projects.
