Bisakah Robot Bergerak Beradaptasi dengan Gelombang Sortir dan Pengambilan Harian?

Perkenalan
Penyortiran dan pengambilan barang merupakan inti dari pemenuhan pesanan modern, dan hal ini semakin tertekan. Masuklah ke banyak pusat distribusi modern dan tantangannya akan terlihat jelas: lebih banyak pesanan, jumlah SKU yang sangat banyak, dan waktu yang jauh lebih sedikit untuk mengirimkannya.
Jumlah produk saja terus bertambah. Seiring gaya hidup konsumen menjadi semakin canggih, perusahaan memperkenalkan variasi yang tak terbatas, seperti produk paket, versi yang sedikit dimodifikasi, set promosi, dan kombinasi nilai tambah. Apa yang dulunya hanya satu SKU dengan cepat bercabang menjadi banyak varian. Hasilnya adalah lingkungan pemenuhan pesanan yang lebih kompleks.
Pada saat yang sama, perilaku pelanggan menjadi lebih sulit diprediksi. Pola pemesanan sekarang menghasilkan lonjakan yang lebih tajam dengan peringatan yang lebih sedikit, terutama di fasilitas yang digunakan bersama oleh beberapa vendor seperti operasi 3PL, gudang multi-tenant, atau lingkungan pemenuhan pesanan tipe Amazon. Fasilitas yang tampak terkendali satu jam sebelumnya tiba-tiba dapat menghadapi lonjakan pesanan yang harus diproses segera.

Sistem pengangkutan yang ada yang digunakan untuk pengambilan dan penyortiran tidak dapat ditingkatkan kapasitasnya, karena beroperasi pada kecepatan tetap. Sistem ini juga tidak dapat dengan cepat menyesuaikan diri dengan fluktuasi permintaan. Baik beroperasi pada kapasitas penuh dengan kotak-kotak yang bergerak rapat satu demi satu atau hanya memindahkan beberapa kotak dalam jarak yang panjang, sistem ini terus mengonsumsi listrik dan mengalami keausan. Kebutuhan perawatan sebagian besar tetap konstan, dan jika mesin penyortir berhenti, seluruh alur biasanya akan berhenti bersamanya.
Untuk operasi pemenuhan pesanan, tantangan sebenarnya bukan lagi otomatisasi dasar, tetapi elastisitas operasional yang nyata dan redundansi bawaan: kemampuan untuk memperluas dan mengurangi kapasitas sebagai respons terhadap permintaan yang fluktuatif tanpa membangun infrastruktur tetap yang berlebihan, sambil menghindari titik kegagalan tunggal.
Inilah kesenjangan antara apa yang disediakan oleh sistem tradisional dan apa yang dibutuhkan oleh operasi modern. Mengatasi kesenjangan ini membutuhkan pendekatan yang berbeda terhadap penyortiran dan pengambilan barang.
SOTR-S sebagai Respons terhadap Variabilitas Permintaan
Salah satu cara untuk mengatasi tantangan ini adalah dengan beralih dari sistem tetap yang berjalan terus menerus menuju model di mana kapasitas dapat menyesuaikan secara dinamis.

SOTR-S dirancang dengan tujuan ini. Dalam pemenuhan pesanan ritel dan e-commerce, sebagian besar kompleksitas muncul pada tingkat unit. Pengambilan barang secara berkelompok (batch picking) banyak digunakan, di mana SKU yang sama yang dibutuhkan oleh beberapa pesanan diambil bersamaan dalam satu kali proses, kemudian disortir dan dikonsolidasikan.
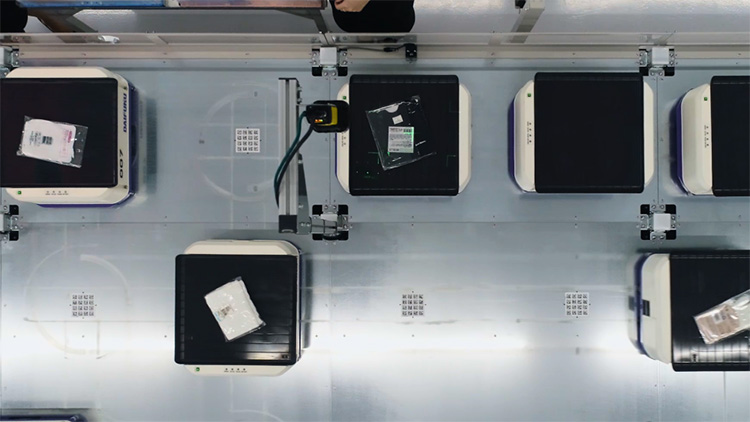
SOTR-S mendukung tahap ini dengan menggunakan sejumlah robot bergerak untuk mengangkut barang-barang individual antar titik proses.
Operator menempatkan barang-barang yang telah dipilih ke atas robot, yang kemudian membawanya ke tujuan yang telah ditentukan. Tidak seperti mesin sortir tradisional, setiap robot berhenti untuk penempatan barang, sehingga operator tidak perlu lagi membidik target yang bergerak. Hal ini mengurangi stres dan membuat proses lebih terkontrol dan konsisten.
Setiap robot menerima tujuannya dari sistem kontrol gudang melalui RTC (Robot Traffic Controller), yang secara dinamis menetapkan tugas dan rute. Kendaraan beroperasi secara independen tetapi dikoordinasikan secara terpusat, memungkinkan sistem untuk terus menyesuaikan diri dengan kondisi beban kerja saat ini.
Dengan mengganti alur tetap dengan pergerakan berbasis tugas yang mobile, SOTR-S menghadirkan fleksibilitas dan kemampuan adaptasi secara real-time yang tidak dimiliki oleh sistem tradisional.
Dari Kapasitas Tetap ke Operasi Berdasarkan Permintaan

Perbedaan desain ini secara langsung mengarah pada model pengoperasian yang berbeda. Dengan konveyor dan sortir tradisional, seperti yang dibahas sebelumnya, sistem harus tersedia terlepas dari apakah sistem tersebut menangani volume puncak atau aliran minimal. Meskipun sistem konveyor yang dirancang dengan baik meminimalkan waktu kerja dengan menghentikan zona konveyor satu per satu untuk menghindari pergerakan yang tidak perlu dan konsumsi listrik, beberapa penggunaan energi yang tidak efisien dan tidak dapat dihindari, bersama dengan keausan mekanis, masih tetap ada bahkan ketika kapasitas produksi terbatas.
Sebaliknya, SOTR-S memungkinkan kapasitas untuk mengikuti permintaan. Karena setiap robot beroperasi secara independen, aktivitas armada terus diselaraskan dengan kebutuhan throughput aktual. Dalam praktiknya, hanya kendaraan yang dibutuhkan pada saat tertentu yang bergerak, berdasarkan beban kerja waktu nyata. Kontrol berbasis tugas yang cerdas ini meminimalkan pergerakan robot yang tidak perlu, sehingga menghasilkan penggunaan energi yang optimal dan pemanfaatan peralatan yang lebih efisien. Selain itu, selama periode di luar jam sibuk yang panjang—seperti bulan-bulan setelah Black Friday dan musim liburan—sebagian armada dapat dinonaktifkan, sehingga semakin meningkatkan efisiensi secara keseluruhan.
Hasilnya, SOTR-S memungkinkan model operasi yang lebih efisien di mana konsumsi energi dan penggunaan peralatan terkait erat dengan beban kerja aktual, bukan kapasitas sistem yang tetap.
Ketahanan Bawaan dan Pemanfaatan Aset yang Efisien
Struktur operasi multi-robot terdistribusi ini juga mengubah ketahanan sistem. Dalam sistem tradisional, satu kegagalan saja dapat mengganggu seluruh operasi. Ketika sebuah mesin sortir berhenti, semuanya berhenti. Dengan SOTR-S, beban didistribusikan ke beberapa robot dan jalur alternatif. Oleh karena itu, kegagalan bersifat lokal: jika satu robot berhenti, hanya beban pada robot tersebut yang terpengaruh sementara bagian sistem lainnya terus beroperasi.
Prinsip yang sama berlaku tidak hanya untuk kegagalan yang tidak terduga, tetapi juga untuk pemeliharaan rutin. Robot individual dapat dimatikan sesuai kebutuhan, memungkinkan pemeliharaan dilakukan tanpa mengganggu pengoperasian sistem. Akibatnya, penghentian sistem secara total—dan inspeksi malam hari yang sering diperlukan dalam sistem tradisional—tidak lagi diperlukan. Pemeliharaan dapat dilakukan dengan cara yang terencana dan terkontrol sementara sistem tetap beroperasi.
Ketahanan bawaan ini, yang dicapai dengan mengisolasi dampak pada tingkat robot, memungkinkan SOTR S untuk mempertahankan operasi berkelanjutan baik selama kegagalan maupun pemeliharaan. Akibatnya, waktu operasional sistem meningkat dan aset digunakan lebih efisien dan dapat diprediksi.
Kesimpulan
SOTR-S memungkinkan model operasi berbasis permintaan di mana kapasitas, penggunaan energi, dan ketersediaan sistem terus menyesuaikan diri dengan beban kerja aktual. Kapasitas produksi dapat disesuaikan secara tepat dengan permintaan aktual, memungkinkan sistem untuk beradaptasi dengan fluktuasi volume tanpa menimbulkan biaya yang tidak perlu. Pada saat yang sama, karena tidak ada satu titik kegagalan pun, sistem terus berjalan bahkan jika satu unit berhenti. Hasilnya adalah model di mana sumber daya hanya digunakan ketika berkontribusi pada pemrosesan, memastikan kinerja yang efisien tanpa pemborosan.
Seri SOTR Daifuku

Ingin tahu lebih banyak tentang Seri SOTR kami dan melihatnya beraksi? Klik tautan di bawah ini untuk mengetahui lebih lanjut.
Cedric Sedo

Insinyur Proyek Senior, Daifuku Eropa
Cedric Sedo adalah insinyur proyek senior di Daifuku dengan pengalaman lebih dari delapan tahun di bidang otomatisasi gudang dan intralogistik. Mengkhususkan diri dalam integrasi sistem, Cedric memainkan peran kunci dalam menghadirkan solusi penanganan material otomatis yang kompleks, memastikan koordinasi yang lancar antara sistem mekanik, listrik, dan perangkat lunak.
Dalam perannya, Cedric berfokus pada implementasi teknologi otomatisasi, bekerja sama erat dengan tim lintas fungsi untuk menghadirkan solusi gudang inovatif dari konsep hingga penerapan operasional. Pengalamannya mencakup integrasi dan pengoperasian sistem otomatisasi canggih yang dirancang untuk meningkatkan efisiensi, skalabilitas, dan keandalan dalam lingkungan distribusi modern.
Cedric memegang gelar MSc di bidang Manajemen Rekayasa dan Diploma Universitas di bidang Pemodelan Informasi Bangunan (BIM). Ia juga bersertifikasi CE Marking melalui sertifikasi CECE oleh TUV NORD, yang menunjukkan komitmennya terhadap kepatuhan, keselamatan, dan keunggulan rekayasa dalam proyek otomatisasi industri.
